# 介绍
HART 协议模块是 C 语言编写的,使用者无需对 HART 协议了解,通过接口文档可以快速完成应用层协议开发。
模块可以分别被主机和从机使用,调用少量接口完成开发,模块接口测试覆盖率 100%。
# 架构
 ## 架构说明
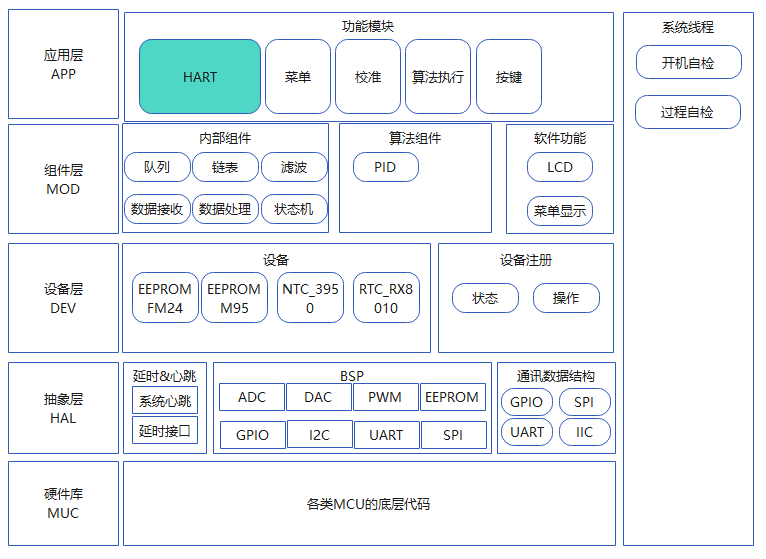
HART 协议模块是设备与主机之间的通信协议,主机和从机之间通过串口通信,主机通过串口发送命令,从机接收命令并返回响应数据。因此,主机和从机都需要使用 HART 协议模块,主机和从机的接口不同,主机接口主要是发送命令,从机接口主要是接收命令并返回响应数据。
考虑到移植性在设计阶段模块因避免使用操作系统相关的接口,模块接口使用回调函数的方式实现,主机和从机需要实现不同的回调函数,主机需要实现发送数据的回调函数,从机需要实现接收数据的回调函数。
# 内容说明
1. 7.9 版本认证支持命令 78、79、534
2. safeHART 数字化安全连锁,一种通讯协议,主要是对数据部分增加了 CRC 校验和序列号,打开 Burst-Mode 后发送的命令发送的是 safeHART 命令。
https://library.fieldcommgroup.org/20085/TS20085/4.0/#page=36
3. 2024 年 3 月 8 日后提交测试必须是 3.8 版本测试
4. 新增 548-553 指令
# 软件设计
## 结构图
│ hart.c
│ hart_cache.c
│ hart_frame.c
│ readme.md
├─inc
│ hart.h
│ hart_common_tables_specification.h
│ hart_frame.h
│ hart_frame_user.h
│
├─lib
│ ├─flow
│ │ example.c
│ │ flow.h
│ │ flow_core.c
│ │ flow_core.h
│ │ flow_def.h
│ │ flow_sem.h
│ │ README.md
│ │
│ ├─inc
│ │ data_type_def.h
│ │ debug.h
│ │ lib.h
│ │ log.h
│ │ malloc.h
│ │ osel_arch.h
│ │ sqqueue.h
│ │
│ └─src
│ debug.c
│ lib.c
│ malloc.c
│ sqqueue.c
│
├─master
│ ├─inc
│ │ hart_master.h
│ │ hart_master_frame.h
│ │ hart_master_req.h
│ │ hart_master_rsp.h
│ │
│ └─src
│ hart_master.c
│ hart_master_frame.c
│ hart_master_req.c
│ hart_master_req_user.c
│ hart_master_rsp.c
│
├─public
│
└─slave
├─inc
│ hart_slave.h
│ hart_slave_frame.h
│ hart_slave_req.h
│
└─src
hart_slave.c
hart_slave_frame.c
hart_slave_req.c
hart_slave_req_user.c
## 组织结构
## 架构说明
HART 协议模块是设备与主机之间的通信协议,主机和从机之间通过串口通信,主机通过串口发送命令,从机接收命令并返回响应数据。因此,主机和从机都需要使用 HART 协议模块,主机和从机的接口不同,主机接口主要是发送命令,从机接口主要是接收命令并返回响应数据。
考虑到移植性在设计阶段模块因避免使用操作系统相关的接口,模块接口使用回调函数的方式实现,主机和从机需要实现不同的回调函数,主机需要实现发送数据的回调函数,从机需要实现接收数据的回调函数。
# 内容说明
1. 7.9 版本认证支持命令 78、79、534
2. safeHART 数字化安全连锁,一种通讯协议,主要是对数据部分增加了 CRC 校验和序列号,打开 Burst-Mode 后发送的命令发送的是 safeHART 命令。
https://library.fieldcommgroup.org/20085/TS20085/4.0/#page=36
3. 2024 年 3 月 8 日后提交测试必须是 3.8 版本测试
4. 新增 548-553 指令
# 软件设计
## 结构图
│ hart.c
│ hart_cache.c
│ hart_frame.c
│ readme.md
├─inc
│ hart.h
│ hart_common_tables_specification.h
│ hart_frame.h
│ hart_frame_user.h
│
├─lib
│ ├─flow
│ │ example.c
│ │ flow.h
│ │ flow_core.c
│ │ flow_core.h
│ │ flow_def.h
│ │ flow_sem.h
│ │ README.md
│ │
│ ├─inc
│ │ data_type_def.h
│ │ debug.h
│ │ lib.h
│ │ log.h
│ │ malloc.h
│ │ osel_arch.h
│ │ sqqueue.h
│ │
│ └─src
│ debug.c
│ lib.c
│ malloc.c
│ sqqueue.c
│
├─master
│ ├─inc
│ │ hart_master.h
│ │ hart_master_frame.h
│ │ hart_master_req.h
│ │ hart_master_rsp.h
│ │
│ └─src
│ hart_master.c
│ hart_master_frame.c
│ hart_master_req.c
│ hart_master_req_user.c
│ hart_master_rsp.c
│
├─public
│
└─slave
├─inc
│ hart_slave.h
│ hart_slave_frame.h
│ hart_slave_req.h
│
└─src
hart_slave.c
hart_slave_frame.c
hart_slave_req.c
hart_slave_req_user.c
## 组织结构
 ## 模块说明
| 文件 | 路径 |
## 模块说明
| 文件 | 路径 | 说明
|
| :-------------------- | :------ | :-------------------------------------------------------------------------------------------------------------------------------------- |
| hart.c | ./ | 用于处理 HART(高阶实时通信技术)模块的接口。这个文件包含了模块的初始化、数据处理、Flash 读写等函数,以及一个用于处理用户事件的回调函数 |
| hart_cache.c | ./ | 一个缓存消息模块,用于处理设备操作需要时间暂时不回复消息的情况 |
| hart_frame.c | ./ | 包含了用于处理帧数据结构、响应码、RTC 时间转换、日期检测等功能 |
| hart_slave.c | ./slave | Hart 从机处理函数,用于处理主机的请求并返回相应的响应 |
| hart_slave_req.c | ./slave | 从机命令响应的处理函数 |
| hart_slave_req_user.c | ./slave | 从机命令响应用户自定义指令的处理函数 |
> 主机模块说明暂时省略
### hart.c
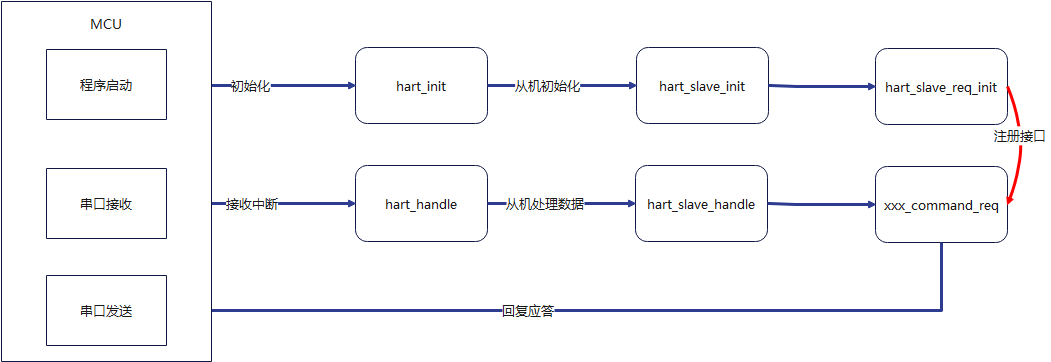
1. hart_init 函数:用于初始化 Hart 模块,根据传入的参数配置模块的工作模式(主模块或从模块)和接口。
2. hart_handle 函数:用于处理接收到的数据,根据模块的工作模式将数据分发给对应的主机或从机处理。
3. hart_storage_write 和 hart_storage_read 函数:用于实现 Flash 的读写操作。
4. perform_self_test 和 perform_self_test_finish 函数:用于自检设备。
5. device_reset 函数:用于设备复位。
6. squawk_control 函数:用于呼叫,根据传入的参数打开或关闭呼叫功能。
7. armed 函数:用于判断是否有技术人员按下一个特殊的按钮或按钮组合。
8. common_event 函数:用于处理用户自定义的事件。
### hart_cache.c
1. 全局变量:sqqueue_ctrl_t cache,这是一个队列控制结构体,用于控制缓存队列的属性。
2. 缓存消息结构体:hart_cache_t,这个结构体包含了一个 uuid 字段,用于存储消息的唯一标识。还有其他一些与具体设备相关的字段,例如设备状态、操作结果等。
3. hart_cache_init(),用于初始化缓存队列。
4. hart_cache_add(),用于向缓存中添加一条消息。首先检查缓存是否已满,如果满则返回。然后分配内存,拷贝数据,并设置 uuid。最后将数据入队。
5. hart_cache_free(),用于释放缓存中一条消息的内存。
6. hart_cache_get(),用于根据 uuid 获取缓存中一条消息。首先检查缓存是否为空,如果为空则返回 NULL。然后遍历缓存中的消息,如果找到匹配的 uuid,则返回该消息。否则将当前消息出队,然后重新入队。
### hart_frame.c
1. hart_frame_data_length_start 和 hart_frame_data_length_end 函数用于在处理请求开始和结束时记录帧数据长度位置。
2. hart_frame_response_code_start 和 hart_frame_response_code_end 函数用于在处理请求开始和结束时记录帧响应码起始位置。
3. hart_frame_response_communication_code 和 hart_frame_master_response_operate_code 函数用于设置和获取响应码第一个字节和第二个字节。
4. hart_is_write_command 函数用于判断指令是否是写。
5. hart_is_support_command 函数用于判断版本是否支持当前指令。
6. rtc_to_timestamp 函数用于将 RTC 时间转时间戳。
7. get_rtc_date 函数用于获取 RTC 的日期。
8. check_date 函数用于检测日期是否有效。
9. is_broadcast_address 函数用于判断地址是否为广播地址。
10. timestamp_to_hmsms 函数用于将时间戳转换为小时:分钟:秒:毫秒的格式。
### hart_slave.c
1. hart_slave_state_check 来检查命令是否合法。如果命令合法,它将调用相应的处理函数 hart_command_ptr_arr[command]来处理命令。如果处理成功,它将返回 True,否则返回 False。
在处理完命令后,函数将响应数据的长度存储在 handle->response->cache_data.payload_length 中。如果响应数据长度不为 0,它将分配内存来存储响应数据,并将数据复制到分配的内存中。最后,它将响应数据结构 handle->response->cache_data 添加到缓存中,并发送响应数据。
2. hart_slave_handle 函数,该函数用于处理从机的请求。
- 首先,检查输入参数是否有效。
- 获取从机的地址。
- 比较主机请求的地址和从机地址是否一致。如果不一致,返回错误。
- 获取命令码。
- 根据命令码查找对应的处理函数。如果找不到对应的处理函数,返回错误。
- 执行处理函数,并将结果存储在 handle->response 结构体中。
- 计算响应数据的长度。
- 如果响应数据长度不为 0,为响应数据分配内存。
- 将响应数据结构体添加到缓存中。
- 返回处理成功。
3. hart_slave_init 函数,用于初始化从机。
- 检查输入参数是否有效。
- 初始化从机的请求处理结构体。
- 返回处理成功
4. hart_slave_device_send 函数,用于发送响应帧给一个 HART 从设备
- 定义一些变量,如响应数据长度、异或校验、数据长度指针、响应码指针等。
- 填充响应帧的数据,包括前导码、地址、命令、负载等。
- 计算响应帧的数据长度,并将结果存储在 data_len_p 中。
- 计算响应帧的校验码,并将结果存储在 response_code_p 中。
- 更新响应帧的长度字段和响应码字段。
- 如果响应帧的数据长度大于 0,调用 handle->response_call 函数将响应帧发送给指定的 UART 索引。同时,增加设备属性的消息计数器。
5. hart_slave_device_attribute_init 函数,用于从机设备属性初始化
### hart_slave_req.c
1. hart_slave_req_init 函数,用于初始化哈希表,用于注册从端发送给主端的命令的处理函数。
- hart_command_ptr_arr 数组,用于存储命令码和处理函数的映射关系。因为命令码的使用不是连续的,因此占用了大量的空间,但是提高了查找效率。
### hart_slave_req_user.c
实现方式上同 hart_slave_req.c,和通用命令做区分
# 移植步骤
这里以 STM32 为例,介绍如何移植 HART 协议模块。
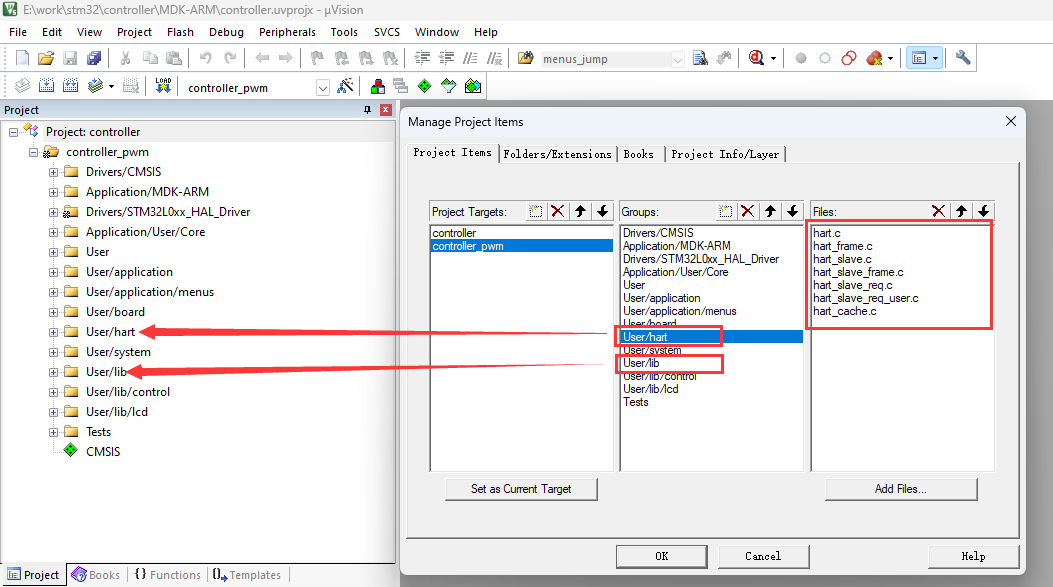
1. 将 HART 协议模块的源码添加到工程中。
HART 协议模块中用到的 lib 也一并加入到工程中。
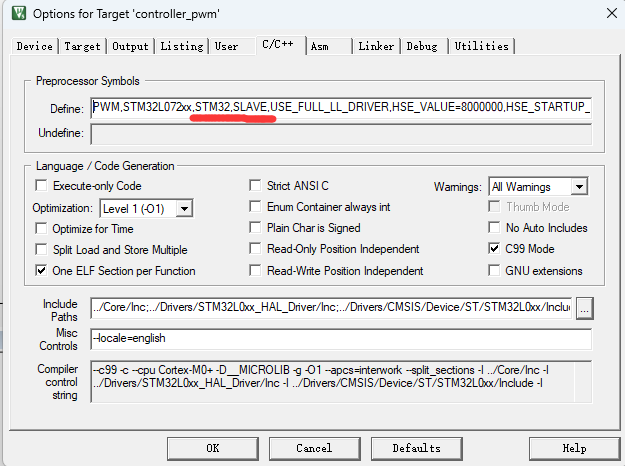
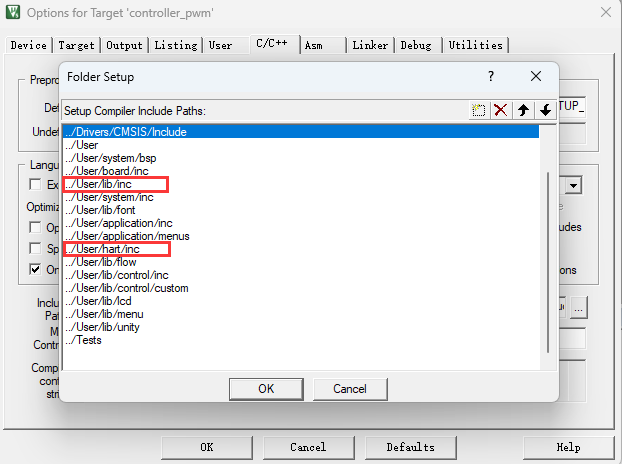
 2. 添加宏定义和头文件
宏定义:STM32,SLAVE
2. 添加宏定义和头文件
宏定义:STM32,SLAVE
 头文件路径
头文件路径
 3. HART 协议和应用层的中间层
该文件主要实现 HART 模块需要的和 MCU 相关的接口,例如串口发送、Flash 读写等。
hart_user_data_refush(): 刷新用户实时数据,包括模拟量和数字量。
response(uint8_t uart_index, uint8_t *data, uint16_t len): 发送数据(hart 协议数据帧)。
flash_read(uint32_t addr, uint8_t *data, uint16_t len): flash 读取接口。
flash_write(uint32_t addr, uint8_t *data, uint16_t len): flash 写入接口。
perform_self_test(void): 执行自检。
device_reset(void): 设备复位。
squawk_control(BOOL open, uint8_t second): 设备呼叫,0 一直呼叫,1-255 秒。
armed(void): 技术人员按下一个特殊的按钮或按钮组合,指示从机应响应 command74。
set_dynamics(device_variable_dynamics_t *const dynamics): 设置动态变量。
hart_rx_cb(uint8_t uart_index, uint8_t \*data, uint16_t len): 串口 1、5 接收中断回调函数。
hart_tx_complete_cb(void): 串口 1 发送完成回调函数。
hart_uart_init(void): 串口 1 初始化。
hart_uart_dinit(void): 串口 1 去初始化。
hart_ble_init(void): BLE 初始化。
hart_ble_dinit(void): BLE 去初始化。
hart_init(void): HART 初始化。
hart_dinit(void): HART 去初始化。
hart_task(void): HART 任务。
源码实现:
```
/*
* @Author: xxx
* @Date: 2023-08-02 08:28:36
* @LastEditors: xxx
* @LastEditTime: 2023-08-23 14:15:44
* @Description: 此文件主要实现板卡的HART功能
* Copyright (c) 2023 by xxx, All Rights Reserved.
*/
#include "app.h"
#include "hart.h"
#include "hart_frame.h"
#include "uarts.h"
#include "test_bsp.h"
#define HART_UART1 USART1
#define HART_UART2 USART5
#define UART_RXSIZE (240u)
#define UART_TXSIZE (240u)
uart_t *uarts[APP_UART_MAX];
app_dynamics_t app_dynamics;
static __IO BOOL hart_idle = TRUE;
static void hart_user_data_refush(void)
{
app_analog_quantity_t *analog_quantity = &app_dynamics.analog_quantity;
app_digital_quantity_t *digital_quantity = &app_dynamics.digital_quantity;
// 模拟量
analog_quantity->input_current = adc_raw[ADC_LOOP_CHANNEL]; // 输入电流
analog_quantity->valve_feedback = adc_raw[ADC_PSB_CHANNEL]; // 阀门反馈
analog_quantity->atmospheric_pressure_source = adc_raw[ADC_BP_CHANNEL]; // 气压源压力
analog_quantity->pressure_at_port_a = 0; // A口压力
analog_quantity->pressure_at_port_b = 0; // B口压力
analog_quantity->amplifier_circuit = adc_raw[ADC_IPSB_CHANNEL]; // 放大器回路
analog_quantity->built_in_temperature = 0; // 内置温度
analog_quantity->ip_output_detection = rt_data.ip_output; // IP输出检测
analog_quantity->valve_percentage = actual_travel; // 阀位百分比
// 数字量
digital_quantity->input_current = loop_current; // 输入电流
digital_quantity->valve_feedback = adc_raw[ADC_PSB_CHANNEL]; // 阀门反馈
digital_quantity->atmospheric_pressure_source = adc_raw[ADC_BP_CHANNEL]; // 气压源压力
digital_quantity->pressure_at_port_a = 0; // A口压力
digital_quantity->pressure_at_port_b = 0; // B口压力
digital_quantity->amplifier_circuit = adc_raw[ADC_IPSB_CHANNEL]; // 放大器回路
digital_quantity->built_in_temperature = 0; // 内置温度
digital_quantity->ip_output_detection = rt_data.ip_output; // IP输出检测
digital_quantity->target_row = target_travel; // 目标行程
digital_quantity->current_row = actual_travel; // 实际行程
digital_quantity->friction = 0; // 摩擦力
digital_quantity->spring_force = 0; // 弹簧力
}
/**
* @brief 发送数据(hart协议数据帧)
* @param {uint8_t} *txBuf
* @param {uint16_t} len
* @return {*}
*/
static void response(uint8_t uart_index, uint8_t *data, uint16_t len)
{
#ifdef STM32
if (uart_index == APP_UART_1)
{
HART_CD_OFF(); // 因为DMA发送调用uart_send_data接口后会立即退出,不需要等待发送是否成功,因此HART_CD_ON需要在DMA发送完成中断中调用
}
uart_send_data(uarts[uart_index], data, len);
#else
LOG_HEX(data, len);
#endif
}
/**
* @brief flash读取接口
* @param {uint32_t} addr
* @param {uint8_t} *data
* @param {uint16_t} len
* @return {*}
*/
static BOOL flash_read(uint32_t addr, uint8_t *data, uint16_t len)
{
m95_1_normal_read(addr, data, len);
return TRUE;
}
/**
* @brief flash写入接口
* @param {uint32_t} addr
* @param {uint8_t} *data
* @param {uint16_t} len
* @return {*}
*/
static BOOL flash_write(uint32_t addr, uint8_t *data, uint16_t len)
{
m95_1_normal_write(addr, data, len);
return TRUE;
}
/**
* @brief 执行自检
* @param {*}
* @return {*}
*/
static void perform_self_test(void)
{
}
/**
* @brief 设备复位
* @param {*}
* @return {*}
*/
static void device_reset(void)
{
}
/**
* @brief 设备呼叫,0一直呼叫,1-255秒
* @param {*}
* @return {*}
*/
static void squawk_control(BOOL open, uint8_t second)
{
}
/**
* @brief 技术人员按下一个特殊的按钮或按钮组合,指示从机应响应command74
* @param {*}
* @return {*}
*/
static BOOL armed(void)
{
return TRUE;
}
/**
* @brief 设置动态变量
* @return {*}
*/
static BOOL set_dynamics(device_variable_dynamics_t *const dynamics)
{
app_analog_quantity_t *analog_quantity = &app_dynamics.analog_quantity;
app_digital_quantity_t *digital_quantity = &app_dynamics.digital_quantity;
// 模拟量
dynamics->dynamics_user.analog_quantity.input_current = &analog_quantity->input_current; // 输入电流
dynamics->dynamics_user.analog_quantity.valve_feedback = &analog_quantity->valve_feedback; // 阀门反馈
dynamics->dynamics_user.analog_quantity.atmospheric_pressure_source = &analog_quantity->atmospheric_pressure_source; // 大气压力源
dynamics->dynamics_user.analog_quantity.pressure_at_port_a = &analog_quantity->pressure_at_port_a; // A口压力
dynamics->dynamics_user.analog_quantity.pressure_at_port_b = &analog_quantity->pressure_at_port_b; // B口压力
dynamics->dynamics_user.analog_quantity.amplifier_circuit = &analog_quantity->amplifier_circuit; // 放大器电路
dynamics->dynamics_user.analog_quantity.built_in_temperature = &analog_quantity->built_in_temperature; // 内置温度
dynamics->dynamics_user.analog_quantity.ip_output_detection = &analog_quantity->ip_output_detection; // IP输出检测
dynamics->dynamics_user.analog_quantity.valve_percentage = &analog_quantity->valve_percentage; // 阀位百分比
// 数字量
dynamics->dynamics_user.digital_quantity.input_current = &digital_quantity->input_current; // 输入电流
dynamics->dynamics_user.digital_quantity.valve_feedback = &digital_quantity->valve_feedback; // 阀门反馈
dynamics->dynamics_user.digital_quantity.atmospheric_pressure_source = &digital_quantity->atmospheric_pressure_source; // 大气压力源
dynamics->dynamics_user.digital_quantity.pressure_at_port_a = &digital_quantity->pressure_at_port_a; // A口压力
dynamics->dynamics_user.digital_quantity.pressure_at_port_b = &digital_quantity->pressure_at_port_b; // B口压力
dynamics->dynamics_user.digital_quantity.amplifier_circuit = &digital_quantity->amplifier_circuit; // 放大器电路
dynamics->dynamics_user.digital_quantity.built_in_temperature = &digital_quantity->built_in_temperature; // 内置温度
dynamics->dynamics_user.digital_quantity.ip_output_detection = &digital_quantity->ip_output_detection; // IP输出检测
dynamics->dynamics_user.digital_quantity.target_row = &digital_quantity->target_row; // 目标行程
dynamics->dynamics_user.digital_quantity.current_row = &digital_quantity->current_row; // 当前行程
dynamics->dynamics_user.digital_quantity.friction = &digital_quantity->friction; // 摩擦力
dynamics->dynamics_user.digital_quantity.spring_force = &digital_quantity->spring_force; // 弹簧力
return TRUE;
}
static BOOL common_event(hart_interface_user_event_e event, const void *const data)
{
switch (event)
{
case HART_COMMAND_257_EVENT:
// 寻找、计算P / I / D
break;
case HART_COMMAND_258_EVENT:
// 计算 摩擦力
break;
case HART_COMMAND_259_EVENT:
// 计算 弹簧力
break;
case HART_COMMAND_UPDATE_EVENT:
// 刷新用户实时数据
hart_user_data_refush();
break;
case HART_COMMAND_500_EVENT:
// 测试命令
return hart_user_test((hart_user_req_t *)data);
default:
return FALSE;
}
return TRUE;
}
// 串口1、5接收中断回调函数
static void hart_rx_cb(uint8_t uart_index, uint8_t *data, uint16_t len)
{
DBG_ASSERT(uart_index < APP_UART_MAX __DBG_LINE);
hart_idle = FALSE;
// 串口1接收HART数据,因为是空闲中断处理这里只过滤掉前导码
hart_handle(uart_index, data, len);
hart_idle = TRUE;
}
static void hart_tx_complete_cb(void)
{
// 串口1发送完成回调函数
HART_CD_ON();
}
void hart_uart_init(void)
{
LL_APB2_GRP1_EnableClock(LL_APB2_GRP1_PERIPH_USART1);
GPIO_SET_OUTPUT(HART_EN_GPIO_Port, HART_EN_Pin);
GPIO_SET_OUTPUT(HART_RST_GPIO_Port, HART_RST_Pin);
GPIO_SET_OUTPUT(HART_CD_GPIO_Port, HART_CD_Pin);
GPIO_SET_ALTERNATE(HART_TX_GPIO_Port, HART_TX_Pin);
GPIO_SET_ALTERNATE(HART_RX_GPIO_Port, HART_RX_Pin);
delay_ms(10);
// 串口1初始化开始
HART_CD_ON();
HART_RST_OFF();
delay_ms(20);
HART_RST_ON();
HART_EN_DISABLE();
HART_EN_ENABLE();
HART_CD_ON();
if (uarts[APP_UART_1] == NULL)
{
uarts[APP_UART_1] = uart_create(HART_UART1, TRUE, UART_RXSIZE, hart_rx_cb, TRUE, UART_TXSIZE, hart_tx_complete_cb);
uarts[APP_UART_1]->uart_index = APP_UART_1;
uarts[APP_UART_1]->dma = DMA1;
uarts[APP_UART_1]->dma_rx_channel = LL_DMA_CHANNEL_3;
uarts[APP_UART_1]->dma_tx_channel = LL_DMA_CHANNEL_2;
uart_recv_en(uarts[APP_UART_1]);
}
// 串口1初始化结束
}
void hart_uart_dinit(void)
{
HART_EN_DISABLE();
LL_APB2_GRP1_DisableClock(LL_APB2_GRP1_PERIPH_USART1);
LL_USART_Disable(USART1);
GPIO_SET_ANALOG(HART_EN_GPIO_Port, HART_EN_Pin);
GPIO_SET_ANALOG(HART_RST_GPIO_Port, HART_RST_Pin);
GPIO_SET_ANALOG(HART_CD_GPIO_Port, HART_CD_Pin);
GPIO_SET_ANALOG(HART_TX_GPIO_Port, HART_TX_Pin);
GPIO_SET_ANALOG(HART_RX_GPIO_Port, HART_RX_Pin);
}
void hart_ble_init(void)
{
LL_APB1_GRP1_EnableClock(LL_APB1_GRP1_PERIPH_USART5);
GPIO_SET_OUTPUT(BLE_PWR_GPIO_Port, BLE_PWR_Pin);
GPIO_SET_INPUT(BLE_STATE_GPIO_Port, BLE_STATE_Pin);
GPIO_SET_ALTERNATE(BLE_TX_GPIO_Port, BLE_TX_Pin);
GPIO_SET_ALTERNATE(BLE_RX_GPIO_Port, BLE_RX_Pin);
BLE_EN_ENABLE();
delay_ms(100);
if (uarts[APP_UART_2] == NULL)
{
uarts[APP_UART_2] = uart_create(HART_UART2, TRUE, UART_RXSIZE, hart_rx_cb, TRUE, UART_TXSIZE, NULL);
uarts[APP_UART_2]->uart_index = APP_UART_2;
uarts[APP_UART_2]->dma = DMA1;
uarts[APP_UART_2]->dma_rx_channel = LL_DMA_CHANNEL_6;
uarts[APP_UART_2]->dma_tx_channel = LL_DMA_CHANNEL_7;
uart_recv_en(uarts[APP_UART_2]);
}
}
void hart_ble_dinit(void)
{
BLE_EN_DISABLE();
LL_APB1_GRP1_DisableClock(LL_APB1_GRP1_PERIPH_USART5);
LL_USART_Disable(USART5);
GPIO_SET_ANALOG(BLE_PWR_GPIO_Port, BLE_PWR_Pin);
GPIO_SET_ANALOG(BLE_STATE_GPIO_Port, BLE_STATE_Pin);
GPIO_SET_ANALOG(BLE_TX_GPIO_Port, BLE_TX_Pin);
GPIO_SET_ANALOG(BLE_RX_GPIO_Port, BLE_RX_Pin);
}
BOOL app_hart_is_idle(void)
{
return hart_idle;
}
BOOL app_hart_init(void)
{
hart_init_t init;
init.hart_protocol_version = HART_PROTOCOL_VERSION_7;
init.dir = MODULE_SLAVE;
init.interface.response = response;
init.interface.flash_read = flash_read;
init.interface.flash_write = flash_write;
init.interface.perform_self_test = perform_self_test;
init.interface.device_reset = device_reset;
init.interface.squawk_control = squawk_control;
init.interface.armed = armed;
init.interface.set_dynamics = set_dynamics;
init.interface.common_event = common_event;
uarts[APP_UART_1] = NULL;
uarts[APP_UART_2] = NULL;
// 判断当前电流 >=8mA启动蓝牙 >=3.8mA启动uart
// 注:串口初始化移动到all_flow
// hart_uart_init();
// hart_ble_init();
return hart_init(&init);
}
```
3. HART 协议和应用层的中间层
该文件主要实现 HART 模块需要的和 MCU 相关的接口,例如串口发送、Flash 读写等。
hart_user_data_refush(): 刷新用户实时数据,包括模拟量和数字量。
response(uint8_t uart_index, uint8_t *data, uint16_t len): 发送数据(hart 协议数据帧)。
flash_read(uint32_t addr, uint8_t *data, uint16_t len): flash 读取接口。
flash_write(uint32_t addr, uint8_t *data, uint16_t len): flash 写入接口。
perform_self_test(void): 执行自检。
device_reset(void): 设备复位。
squawk_control(BOOL open, uint8_t second): 设备呼叫,0 一直呼叫,1-255 秒。
armed(void): 技术人员按下一个特殊的按钮或按钮组合,指示从机应响应 command74。
set_dynamics(device_variable_dynamics_t *const dynamics): 设置动态变量。
hart_rx_cb(uint8_t uart_index, uint8_t \*data, uint16_t len): 串口 1、5 接收中断回调函数。
hart_tx_complete_cb(void): 串口 1 发送完成回调函数。
hart_uart_init(void): 串口 1 初始化。
hart_uart_dinit(void): 串口 1 去初始化。
hart_ble_init(void): BLE 初始化。
hart_ble_dinit(void): BLE 去初始化。
hart_init(void): HART 初始化。
hart_dinit(void): HART 去初始化。
hart_task(void): HART 任务。
源码实现:
```
/*
* @Author: xxx
* @Date: 2023-08-02 08:28:36
* @LastEditors: xxx
* @LastEditTime: 2023-08-23 14:15:44
* @Description: 此文件主要实现板卡的HART功能
* Copyright (c) 2023 by xxx, All Rights Reserved.
*/
#include "app.h"
#include "hart.h"
#include "hart_frame.h"
#include "uarts.h"
#include "test_bsp.h"
#define HART_UART1 USART1
#define HART_UART2 USART5
#define UART_RXSIZE (240u)
#define UART_TXSIZE (240u)
uart_t *uarts[APP_UART_MAX];
app_dynamics_t app_dynamics;
static __IO BOOL hart_idle = TRUE;
static void hart_user_data_refush(void)
{
app_analog_quantity_t *analog_quantity = &app_dynamics.analog_quantity;
app_digital_quantity_t *digital_quantity = &app_dynamics.digital_quantity;
// 模拟量
analog_quantity->input_current = adc_raw[ADC_LOOP_CHANNEL]; // 输入电流
analog_quantity->valve_feedback = adc_raw[ADC_PSB_CHANNEL]; // 阀门反馈
analog_quantity->atmospheric_pressure_source = adc_raw[ADC_BP_CHANNEL]; // 气压源压力
analog_quantity->pressure_at_port_a = 0; // A口压力
analog_quantity->pressure_at_port_b = 0; // B口压力
analog_quantity->amplifier_circuit = adc_raw[ADC_IPSB_CHANNEL]; // 放大器回路
analog_quantity->built_in_temperature = 0; // 内置温度
analog_quantity->ip_output_detection = rt_data.ip_output; // IP输出检测
analog_quantity->valve_percentage = actual_travel; // 阀位百分比
// 数字量
digital_quantity->input_current = loop_current; // 输入电流
digital_quantity->valve_feedback = adc_raw[ADC_PSB_CHANNEL]; // 阀门反馈
digital_quantity->atmospheric_pressure_source = adc_raw[ADC_BP_CHANNEL]; // 气压源压力
digital_quantity->pressure_at_port_a = 0; // A口压力
digital_quantity->pressure_at_port_b = 0; // B口压力
digital_quantity->amplifier_circuit = adc_raw[ADC_IPSB_CHANNEL]; // 放大器回路
digital_quantity->built_in_temperature = 0; // 内置温度
digital_quantity->ip_output_detection = rt_data.ip_output; // IP输出检测
digital_quantity->target_row = target_travel; // 目标行程
digital_quantity->current_row = actual_travel; // 实际行程
digital_quantity->friction = 0; // 摩擦力
digital_quantity->spring_force = 0; // 弹簧力
}
/**
* @brief 发送数据(hart协议数据帧)
* @param {uint8_t} *txBuf
* @param {uint16_t} len
* @return {*}
*/
static void response(uint8_t uart_index, uint8_t *data, uint16_t len)
{
#ifdef STM32
if (uart_index == APP_UART_1)
{
HART_CD_OFF(); // 因为DMA发送调用uart_send_data接口后会立即退出,不需要等待发送是否成功,因此HART_CD_ON需要在DMA发送完成中断中调用
}
uart_send_data(uarts[uart_index], data, len);
#else
LOG_HEX(data, len);
#endif
}
/**
* @brief flash读取接口
* @param {uint32_t} addr
* @param {uint8_t} *data
* @param {uint16_t} len
* @return {*}
*/
static BOOL flash_read(uint32_t addr, uint8_t *data, uint16_t len)
{
m95_1_normal_read(addr, data, len);
return TRUE;
}
/**
* @brief flash写入接口
* @param {uint32_t} addr
* @param {uint8_t} *data
* @param {uint16_t} len
* @return {*}
*/
static BOOL flash_write(uint32_t addr, uint8_t *data, uint16_t len)
{
m95_1_normal_write(addr, data, len);
return TRUE;
}
/**
* @brief 执行自检
* @param {*}
* @return {*}
*/
static void perform_self_test(void)
{
}
/**
* @brief 设备复位
* @param {*}
* @return {*}
*/
static void device_reset(void)
{
}
/**
* @brief 设备呼叫,0一直呼叫,1-255秒
* @param {*}
* @return {*}
*/
static void squawk_control(BOOL open, uint8_t second)
{
}
/**
* @brief 技术人员按下一个特殊的按钮或按钮组合,指示从机应响应command74
* @param {*}
* @return {*}
*/
static BOOL armed(void)
{
return TRUE;
}
/**
* @brief 设置动态变量
* @return {*}
*/
static BOOL set_dynamics(device_variable_dynamics_t *const dynamics)
{
app_analog_quantity_t *analog_quantity = &app_dynamics.analog_quantity;
app_digital_quantity_t *digital_quantity = &app_dynamics.digital_quantity;
// 模拟量
dynamics->dynamics_user.analog_quantity.input_current = &analog_quantity->input_current; // 输入电流
dynamics->dynamics_user.analog_quantity.valve_feedback = &analog_quantity->valve_feedback; // 阀门反馈
dynamics->dynamics_user.analog_quantity.atmospheric_pressure_source = &analog_quantity->atmospheric_pressure_source; // 大气压力源
dynamics->dynamics_user.analog_quantity.pressure_at_port_a = &analog_quantity->pressure_at_port_a; // A口压力
dynamics->dynamics_user.analog_quantity.pressure_at_port_b = &analog_quantity->pressure_at_port_b; // B口压力
dynamics->dynamics_user.analog_quantity.amplifier_circuit = &analog_quantity->amplifier_circuit; // 放大器电路
dynamics->dynamics_user.analog_quantity.built_in_temperature = &analog_quantity->built_in_temperature; // 内置温度
dynamics->dynamics_user.analog_quantity.ip_output_detection = &analog_quantity->ip_output_detection; // IP输出检测
dynamics->dynamics_user.analog_quantity.valve_percentage = &analog_quantity->valve_percentage; // 阀位百分比
// 数字量
dynamics->dynamics_user.digital_quantity.input_current = &digital_quantity->input_current; // 输入电流
dynamics->dynamics_user.digital_quantity.valve_feedback = &digital_quantity->valve_feedback; // 阀门反馈
dynamics->dynamics_user.digital_quantity.atmospheric_pressure_source = &digital_quantity->atmospheric_pressure_source; // 大气压力源
dynamics->dynamics_user.digital_quantity.pressure_at_port_a = &digital_quantity->pressure_at_port_a; // A口压力
dynamics->dynamics_user.digital_quantity.pressure_at_port_b = &digital_quantity->pressure_at_port_b; // B口压力
dynamics->dynamics_user.digital_quantity.amplifier_circuit = &digital_quantity->amplifier_circuit; // 放大器电路
dynamics->dynamics_user.digital_quantity.built_in_temperature = &digital_quantity->built_in_temperature; // 内置温度
dynamics->dynamics_user.digital_quantity.ip_output_detection = &digital_quantity->ip_output_detection; // IP输出检测
dynamics->dynamics_user.digital_quantity.target_row = &digital_quantity->target_row; // 目标行程
dynamics->dynamics_user.digital_quantity.current_row = &digital_quantity->current_row; // 当前行程
dynamics->dynamics_user.digital_quantity.friction = &digital_quantity->friction; // 摩擦力
dynamics->dynamics_user.digital_quantity.spring_force = &digital_quantity->spring_force; // 弹簧力
return TRUE;
}
static BOOL common_event(hart_interface_user_event_e event, const void *const data)
{
switch (event)
{
case HART_COMMAND_257_EVENT:
// 寻找、计算P / I / D
break;
case HART_COMMAND_258_EVENT:
// 计算 摩擦力
break;
case HART_COMMAND_259_EVENT:
// 计算 弹簧力
break;
case HART_COMMAND_UPDATE_EVENT:
// 刷新用户实时数据
hart_user_data_refush();
break;
case HART_COMMAND_500_EVENT:
// 测试命令
return hart_user_test((hart_user_req_t *)data);
default:
return FALSE;
}
return TRUE;
}
// 串口1、5接收中断回调函数
static void hart_rx_cb(uint8_t uart_index, uint8_t *data, uint16_t len)
{
DBG_ASSERT(uart_index < APP_UART_MAX __DBG_LINE);
hart_idle = FALSE;
// 串口1接收HART数据,因为是空闲中断处理这里只过滤掉前导码
hart_handle(uart_index, data, len);
hart_idle = TRUE;
}
static void hart_tx_complete_cb(void)
{
// 串口1发送完成回调函数
HART_CD_ON();
}
void hart_uart_init(void)
{
LL_APB2_GRP1_EnableClock(LL_APB2_GRP1_PERIPH_USART1);
GPIO_SET_OUTPUT(HART_EN_GPIO_Port, HART_EN_Pin);
GPIO_SET_OUTPUT(HART_RST_GPIO_Port, HART_RST_Pin);
GPIO_SET_OUTPUT(HART_CD_GPIO_Port, HART_CD_Pin);
GPIO_SET_ALTERNATE(HART_TX_GPIO_Port, HART_TX_Pin);
GPIO_SET_ALTERNATE(HART_RX_GPIO_Port, HART_RX_Pin);
delay_ms(10);
// 串口1初始化开始
HART_CD_ON();
HART_RST_OFF();
delay_ms(20);
HART_RST_ON();
HART_EN_DISABLE();
HART_EN_ENABLE();
HART_CD_ON();
if (uarts[APP_UART_1] == NULL)
{
uarts[APP_UART_1] = uart_create(HART_UART1, TRUE, UART_RXSIZE, hart_rx_cb, TRUE, UART_TXSIZE, hart_tx_complete_cb);
uarts[APP_UART_1]->uart_index = APP_UART_1;
uarts[APP_UART_1]->dma = DMA1;
uarts[APP_UART_1]->dma_rx_channel = LL_DMA_CHANNEL_3;
uarts[APP_UART_1]->dma_tx_channel = LL_DMA_CHANNEL_2;
uart_recv_en(uarts[APP_UART_1]);
}
// 串口1初始化结束
}
void hart_uart_dinit(void)
{
HART_EN_DISABLE();
LL_APB2_GRP1_DisableClock(LL_APB2_GRP1_PERIPH_USART1);
LL_USART_Disable(USART1);
GPIO_SET_ANALOG(HART_EN_GPIO_Port, HART_EN_Pin);
GPIO_SET_ANALOG(HART_RST_GPIO_Port, HART_RST_Pin);
GPIO_SET_ANALOG(HART_CD_GPIO_Port, HART_CD_Pin);
GPIO_SET_ANALOG(HART_TX_GPIO_Port, HART_TX_Pin);
GPIO_SET_ANALOG(HART_RX_GPIO_Port, HART_RX_Pin);
}
void hart_ble_init(void)
{
LL_APB1_GRP1_EnableClock(LL_APB1_GRP1_PERIPH_USART5);
GPIO_SET_OUTPUT(BLE_PWR_GPIO_Port, BLE_PWR_Pin);
GPIO_SET_INPUT(BLE_STATE_GPIO_Port, BLE_STATE_Pin);
GPIO_SET_ALTERNATE(BLE_TX_GPIO_Port, BLE_TX_Pin);
GPIO_SET_ALTERNATE(BLE_RX_GPIO_Port, BLE_RX_Pin);
BLE_EN_ENABLE();
delay_ms(100);
if (uarts[APP_UART_2] == NULL)
{
uarts[APP_UART_2] = uart_create(HART_UART2, TRUE, UART_RXSIZE, hart_rx_cb, TRUE, UART_TXSIZE, NULL);
uarts[APP_UART_2]->uart_index = APP_UART_2;
uarts[APP_UART_2]->dma = DMA1;
uarts[APP_UART_2]->dma_rx_channel = LL_DMA_CHANNEL_6;
uarts[APP_UART_2]->dma_tx_channel = LL_DMA_CHANNEL_7;
uart_recv_en(uarts[APP_UART_2]);
}
}
void hart_ble_dinit(void)
{
BLE_EN_DISABLE();
LL_APB1_GRP1_DisableClock(LL_APB1_GRP1_PERIPH_USART5);
LL_USART_Disable(USART5);
GPIO_SET_ANALOG(BLE_PWR_GPIO_Port, BLE_PWR_Pin);
GPIO_SET_ANALOG(BLE_STATE_GPIO_Port, BLE_STATE_Pin);
GPIO_SET_ANALOG(BLE_TX_GPIO_Port, BLE_TX_Pin);
GPIO_SET_ANALOG(BLE_RX_GPIO_Port, BLE_RX_Pin);
}
BOOL app_hart_is_idle(void)
{
return hart_idle;
}
BOOL app_hart_init(void)
{
hart_init_t init;
init.hart_protocol_version = HART_PROTOCOL_VERSION_7;
init.dir = MODULE_SLAVE;
init.interface.response = response;
init.interface.flash_read = flash_read;
init.interface.flash_write = flash_write;
init.interface.perform_self_test = perform_self_test;
init.interface.device_reset = device_reset;
init.interface.squawk_control = squawk_control;
init.interface.armed = armed;
init.interface.set_dynamics = set_dynamics;
init.interface.common_event = common_event;
uarts[APP_UART_1] = NULL;
uarts[APP_UART_2] = NULL;
// 判断当前电流 >=8mA启动蓝牙 >=3.8mA启动uart
// 注:串口初始化移动到all_flow
// hart_uart_init();
// hart_ble_init();
return hart_init(&init);
}
```