|
|
||
|---|---|---|
| .vscode | ||
| Core | ||
| Drivers | ||
| MDK-ARM | ||
| Middlewares/ST/ARM/DSP | ||
| Public/img | ||
| Tests | ||
| User | ||
| .gitignore | ||
| .mxproject | ||
| Makefile | ||
| README.md | ||
| bash.exe.stackdump | ||
| controller-v2.ioc | ||
| keilkill.bat | ||
README.md
项目简介
本项目是基于STM32L072开发的控制器。
目录说明
+---application 应用层,需要实现的功能 | +---inc | ---src +---board 和开发板有关的设备驱动,基于BSP或者LIB中的模块生成的驱动 | +---inc | ---src +---hart HART协议相关 | +---inc | +---master 主设备协议 | | +---inc | | ---src | ---slave 终端协议 | +---inc | ---src +---lib 通用的库,和硬件无关 | +---control PID控制器 | | +---inc | | ---src | +---flow 流程控制 | | ---.vscode | +---font 字体 | +---inc 通用头文件 | +---lcd LCD显示 | +---menu 菜单 | +---src 通用源文件 ---system 系统层,和硬件有关的驱动 +---bsp 板级支持包,基于LL库开发 +---inc 系统头文件 ---src 系统源文件
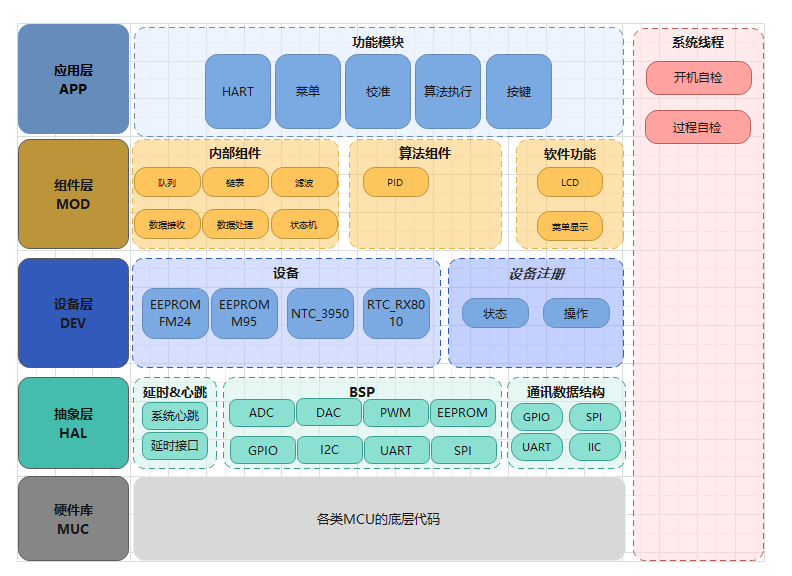
架构图
未处理问题
- 开机通电时间
- 全开全关时间
- 蓝牙在手动模式下使用
- 控制满足条件
a) 位置起动时间与信号给出时间的滞后不大于1s(25%阶跃);
b) 最终定位与信号要求位置误差不大于±0.5%,稳态时间小于2s;
c) 调节过程位移过冲不大于1%;
d) 动态误差带小于5%;
e) 动态线性度小于1%;
f) 满足振动(包括管道内波动)试验要求。
g) 需要考虑不同的摩擦力